Artificial Skin
A Touch Forward: Pioneering Robotics HCI/UX & Engineering with Synthetic Skin for Safer Autonomous Robot Traversal.
Artificial Skin
A Touch Forward: Pioneering Robotics HCI/UX & Engineering with Synthetic Skin for Safer Autonomous Robot Traversal.
Artificial Skin
A Touch Forward: Pioneering Robotics HCI/UX & Engineering with Synthetic Skin for Safer Autonomous Robot Traversal.
Artificial Skin
A Touch Forward: Pioneering Robotics HCI/UX & Engineering with Synthetic Skin for Safer Autonomous Robot Traversal.
Project
PhD Research
Role
Researcher & Engineer
Year
2024 - 2026
Situation
In the field of robotics, the capability to navigate and traverse complex environments with minimal human intervention represents a significant challenge that directly impacts autonomy and operational efficiency. Navigation, which encompasses the computational aspect of route planning amidst obstacles, and traversal, the physical embodiment of this plan through movement and interaction within an environment, are critical components of robotic autonomy.
Despite advancements in sensor technologies such as Simultaneous Localization and Mapping (SLAM), RGB-D cameras, and proximity sensors, robots continue to encounter difficulties in autonomous operation, frequently requiring human oversight, encountering obstacles, or even sustaining damage due to inadequate environmental interaction capabilities.
This situation raises a crucial question: How can we substantially improve robots' traversal capabilities in diverse and complex environments? A potential avenue for exploration is the development of a modular, adaptive safety system. Such a system should be universally applicable across various robot designs and sizes, enhancing their ability to navigate and interact with their surroundings safely and efficiently. The goal is to bridge the gap between the theoretical robustness of navigation algorithms and the practical challenges of real-world traversal, thereby increasing the autonomy and utility of robotic systems.
Situation
In the field of robotics, the capability to navigate and traverse complex environments with minimal human intervention represents a significant challenge that directly impacts autonomy and operational efficiency. Navigation, which encompasses the computational aspect of route planning amidst obstacles, and traversal, the physical embodiment of this plan through movement and interaction within an environment, are critical components of robotic autonomy.
Despite advancements in sensor technologies such as Simultaneous Localization and Mapping (SLAM), RGB-D cameras, and proximity sensors, robots continue to encounter difficulties in autonomous operation, frequently requiring human oversight, encountering obstacles, or even sustaining damage due to inadequate environmental interaction capabilities.
This situation raises a crucial question: How can we substantially improve robots' traversal capabilities in diverse and complex environments? A potential avenue for exploration is the development of a modular, adaptive safety system. Such a system should be universally applicable across various robot designs and sizes, enhancing their ability to navigate and interact with their surroundings safely and efficiently. The goal is to bridge the gap between the theoretical robustness of navigation algorithms and the practical challenges of real-world traversal, thereby increasing the autonomy and utility of robotic systems.
Task
My task was to create a synthetic skin safety system that mimicked human skin. It involved designing and building a 3x3 tile integrated with an Arduino Nano 33 BLE Sense Rev 2, capable of sensing temperature, pressure, and terrain. This system was to be independent of robot integration and applicable to both new and existing robots.
Task
My task was to create a synthetic skin safety system that mimicked human skin. It involved designing and building a 3x3 tile integrated with an Arduino Nano 33 BLE Sense Rev 2, capable of sensing temperature, pressure, and terrain. This system was to be independent of robot integration and applicable to both new and existing robots.
Task
My task was to create a synthetic skin safety system that mimicked human skin. It involved designing and building a 3x3 tile integrated with an Arduino Nano 33 BLE Sense Rev 2, capable of sensing temperature, pressure, and terrain. This system was to be independent of robot integration and applicable to both new and existing robots.
Task
My task was to create a synthetic skin safety system that mimicked human skin. It involved designing and building a 3x3 tile integrated with an Arduino Nano 33 BLE Sense Rev 2, capable of sensing temperature, pressure, and terrain. This system was to be independent of robot integration and applicable to both new and existing robots.
Exploratory Research
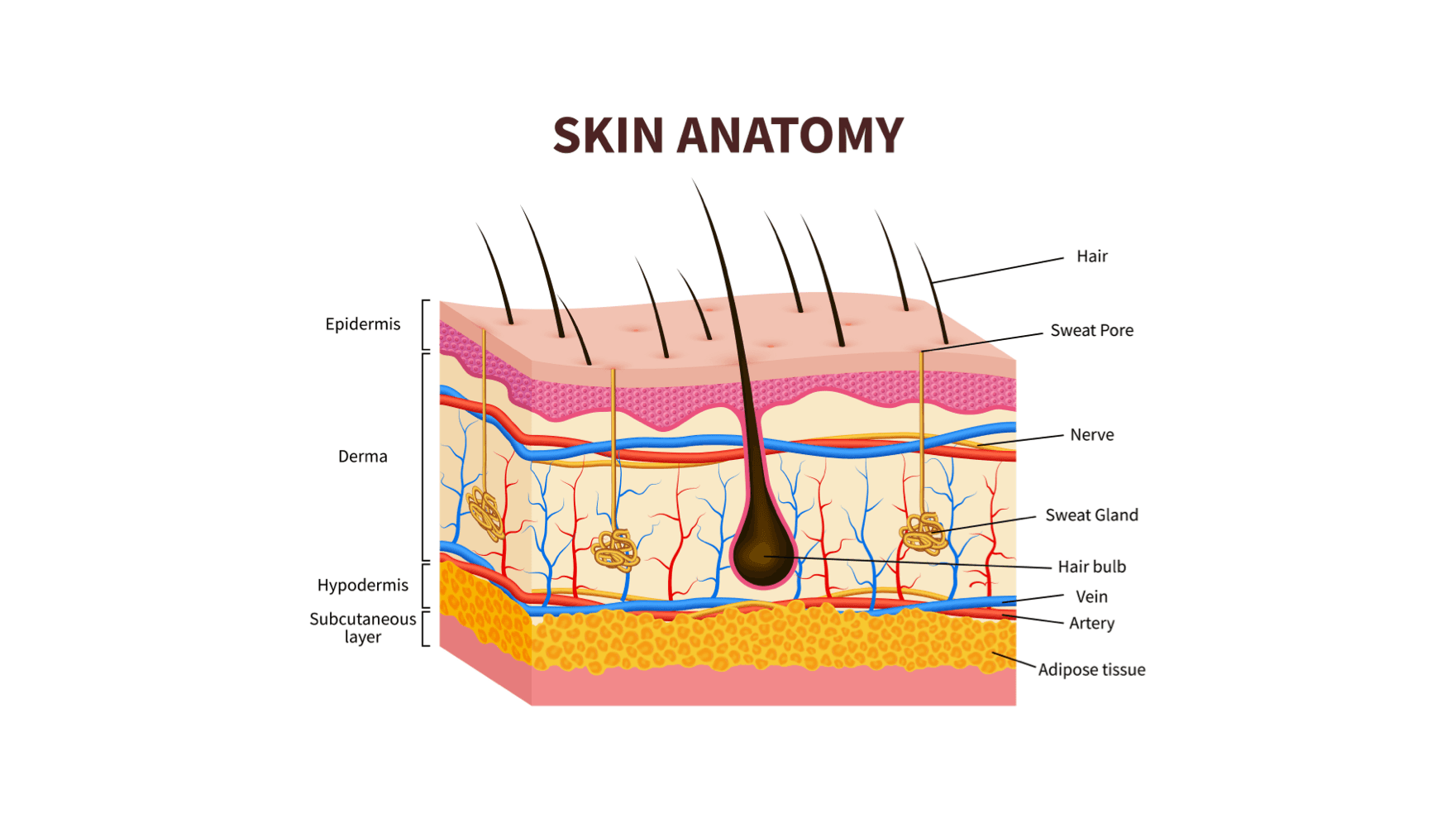
Investigated the intricate structure of human skin and surveyed existing technological advancements. This exploration aimed to understand the biological inspiration behind tactile sensing and its potential application in robotics. The study covered the three primary skin layers—epidermis, dermis, and hypodermis—each offering unique protective and sensory functions that could be mimicked in synthetic forms. This foundational research laid the groundwork for developing a robotic skin that could potentially revolutionize how machines interact with their environments
Exploratory Research
Investigated the intricate structure of human skin and surveyed existing technological advancements. This exploration aimed to understand the biological inspiration behind tactile sensing and its potential application in robotics. The study covered the three primary skin layers—epidermis, dermis, and hypodermis—each offering unique protective and sensory functions that could be mimicked in synthetic forms. This foundational research laid the groundwork for developing a robotic skin that could potentially revolutionize how machines interact with their environments
Exploratory Research
Investigated the intricate structure of human skin and surveyed existing technological advancements. This exploration aimed to understand the biological inspiration behind tactile sensing and its potential application in robotics. The study covered the three primary skin layers—epidermis, dermis, and hypodermis—each offering unique protective and sensory functions that could be mimicked in synthetic forms. This foundational research laid the groundwork for developing a robotic skin that could potentially revolutionize how machines interact with their environments
Exploratory Research
Investigated the intricate structure of human skin and surveyed existing technological advancements. This exploration aimed to understand the biological inspiration behind tactile sensing and its potential application in robotics. The study covered the three primary skin layers—epidermis, dermis, and hypodermis—each offering unique protective and sensory functions that could be mimicked in synthetic forms. This foundational research laid the groundwork for developing a robotic skin that could potentially revolutionize how machines interact with their environments
Requirements Gathering
Defined precise technical specifications for synthetic skin, ensuring compatibility with the Arduino Nano 33 BLE Sense Rev 2. This step involved detailed analysis of the microcontroller's capabilities, focusing on sensor integration and data processing requirements. The goal was to ensure the synthetic skin could effectively utilize the Arduino's onboard sensors for environmental interaction, thereby enhancing robotic sensory perception and response capabilities.
Requirements Gathering
Defined precise technical specifications for synthetic skin, ensuring compatibility with the Arduino Nano 33 BLE Sense Rev 2. This step involved detailed analysis of the microcontroller's capabilities, focusing on sensor integration and data processing requirements. The goal was to ensure the synthetic skin could effectively utilize the Arduino's onboard sensors for environmental interaction, thereby enhancing robotic sensory perception and response capabilities.
Requirements Gathering
Defined precise technical specifications for synthetic skin, ensuring compatibility with the Arduino Nano 33 BLE Sense Rev 2. This step involved detailed analysis of the microcontroller's capabilities, focusing on sensor integration and data processing requirements. The goal was to ensure the synthetic skin could effectively utilize the Arduino's onboard sensors for environmental interaction, thereby enhancing robotic sensory perception and response capabilities.
Requirements Gathering
Defined precise technical specifications for synthetic skin, ensuring compatibility with the Arduino Nano 33 BLE Sense Rev 2. This step involved detailed analysis of the microcontroller's capabilities, focusing on sensor integration and data processing requirements. The goal was to ensure the synthetic skin could effectively utilize the Arduino's onboard sensors for environmental interaction, thereby enhancing robotic sensory perception and response capabilities.
Hardware Design & Fabrication
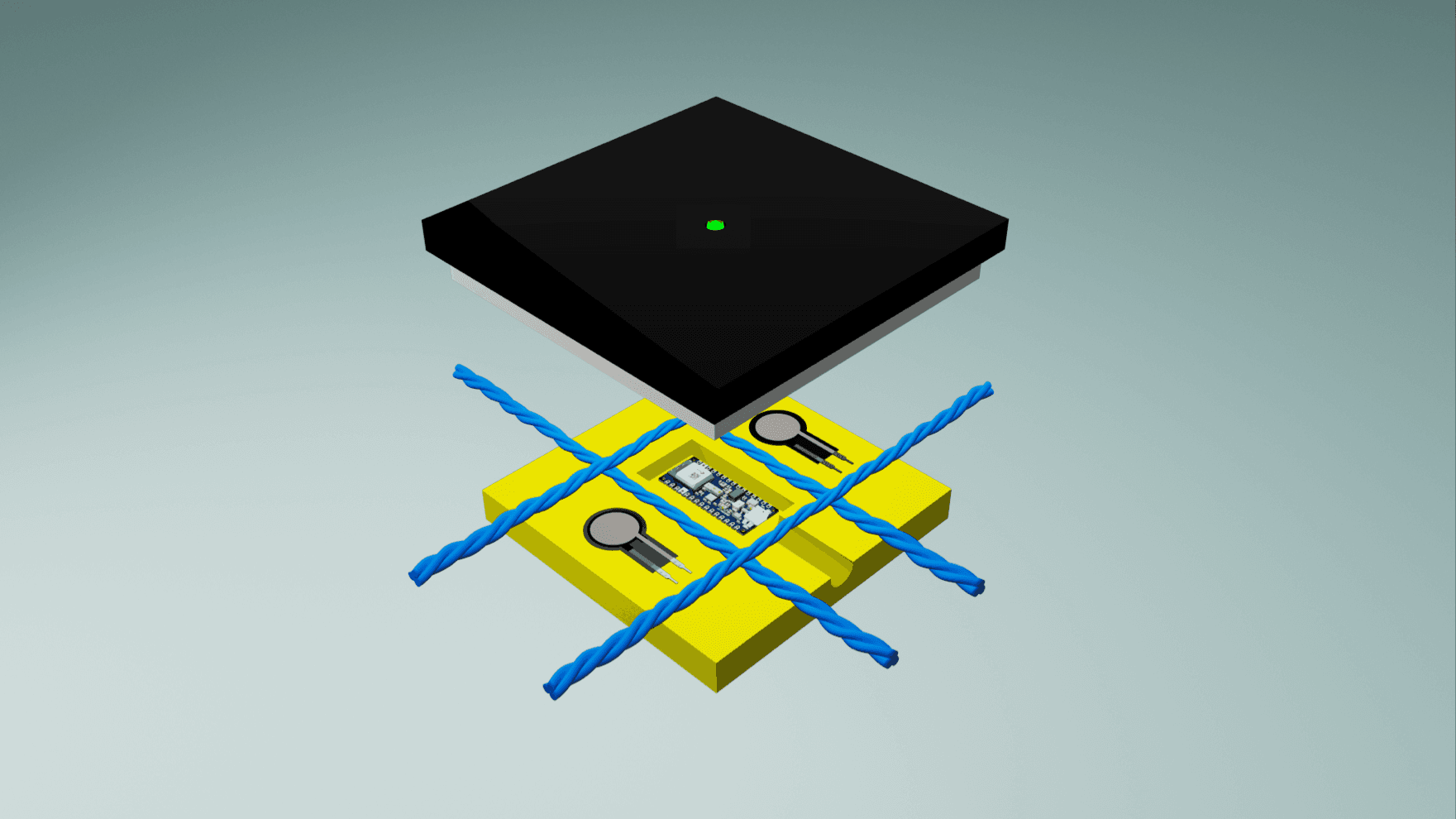
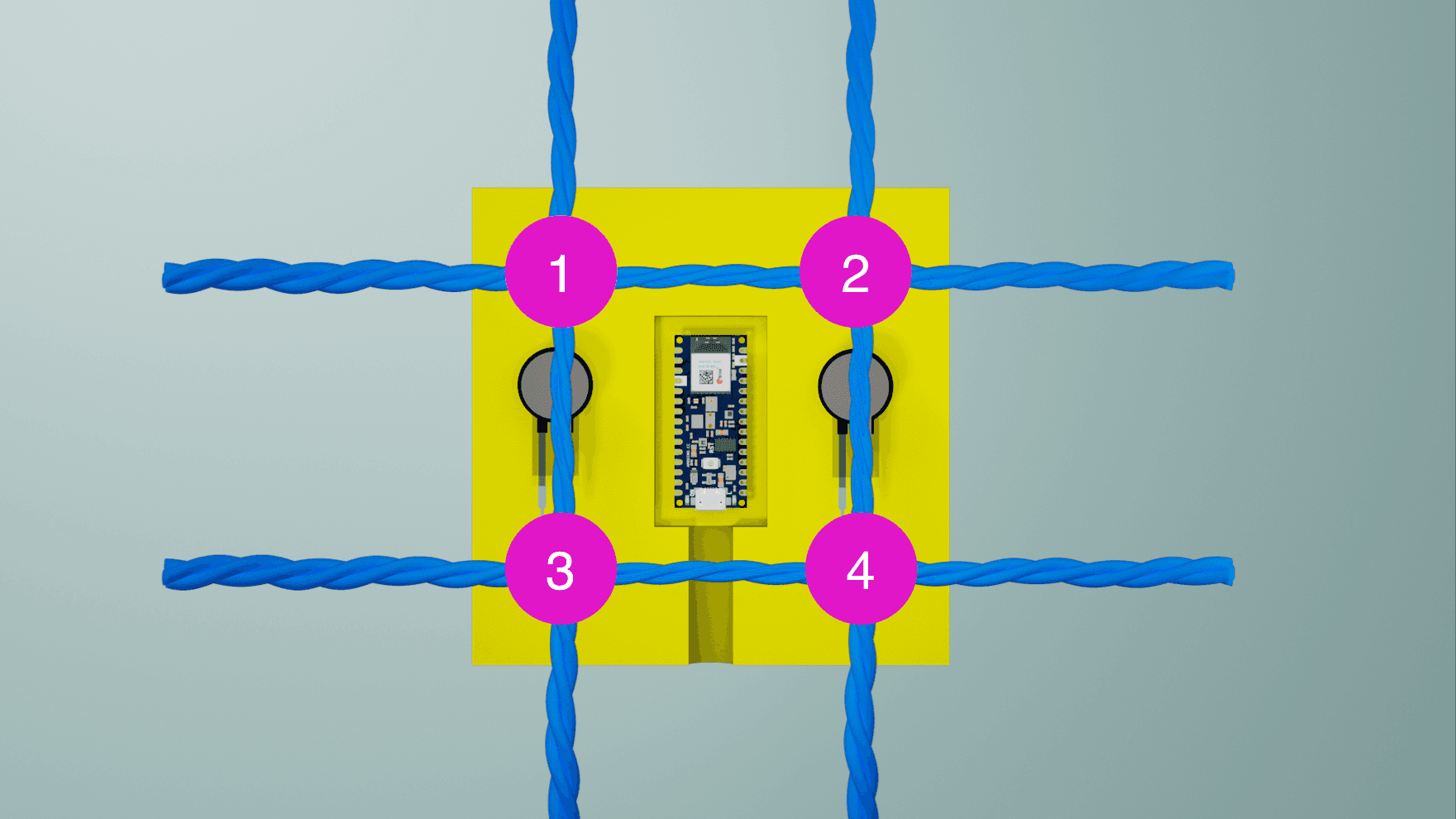
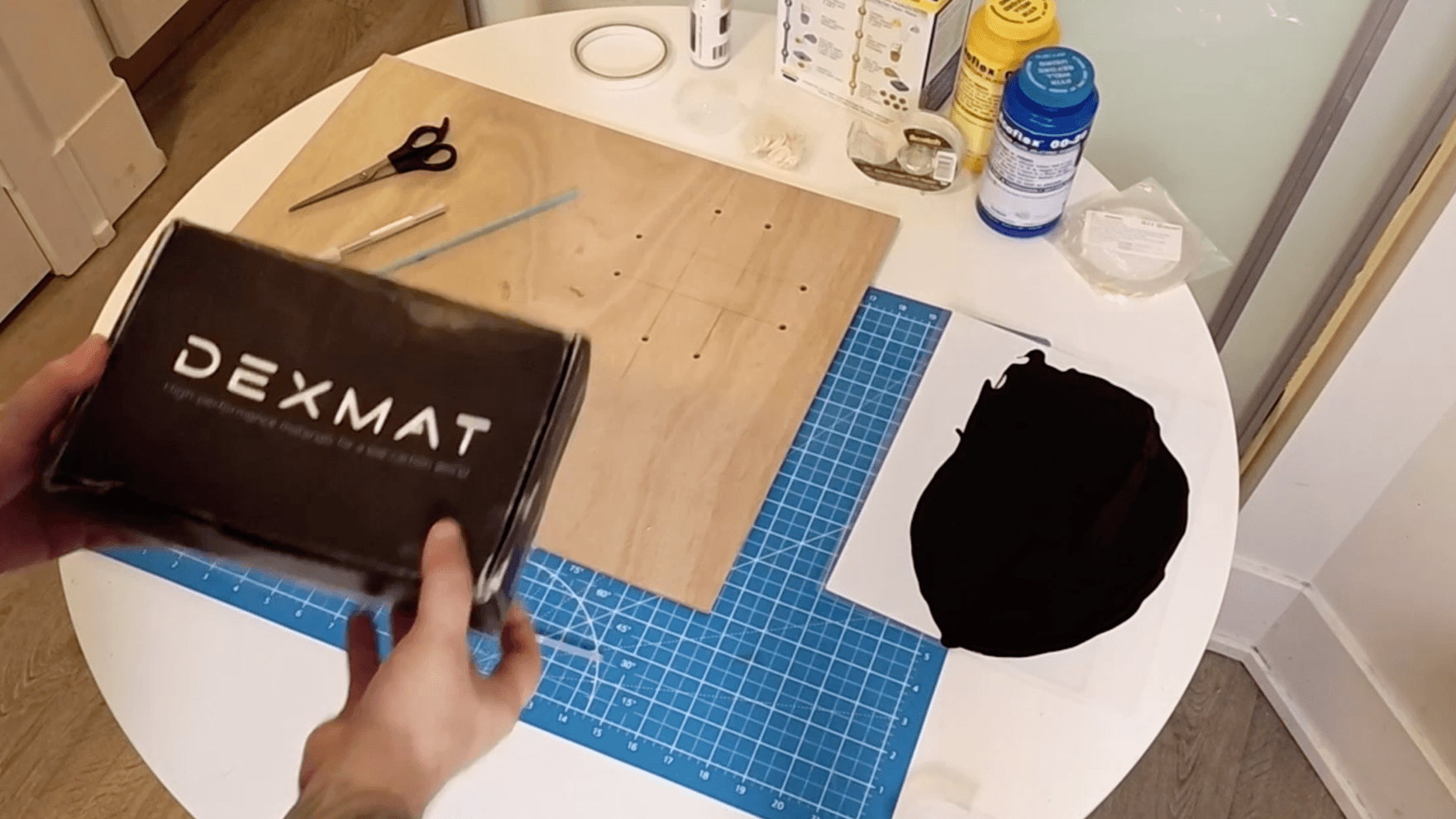
Developed a comprehensive layered architecture for the synthetic skin, utilizing cutting-edge materials like Dragon Skin silicone, DexMat CNT Yarn, and EcoFlex Gel. This design mimics the multi-layered nature of human skin, incorporating advanced materials for their specific properties—elasticity, conductivity, and cushioning. The integration of the Arduino Nano 33 BLE Sense Rev 2 within this architecture allows for sophisticated data processing directly on the hardware, enabling real-time sensory feedback.
Embarked on the meticulous construction of the synthetic skin, embedding a network of sensors within its structure. The fabrication process focused on replicating human skin's functionality, integrating edge computing capabilities to process data locally. This approach ensures the synthetic skin can operate independently, providing valuable sensory feedback for robotic systems. The inclusion of embedded sensors allows for the detection of environmental variables, crucial for robotic navigation and interaction.
Hardware Design & Fabrication
Developed a comprehensive layered architecture for the synthetic skin, utilizing cutting-edge materials like Dragon Skin silicone, DexMat CNT Yarn, and EcoFlex Gel. This design mimics the multi-layered nature of human skin, incorporating advanced materials for their specific properties—elasticity, conductivity, and cushioning. The integration of the Arduino Nano 33 BLE Sense Rev 2 within this architecture allows for sophisticated data processing directly on the hardware, enabling real-time sensory feedback.
Embarked on the meticulous construction of the synthetic skin, embedding a network of sensors within its structure. The fabrication process focused on replicating human skin's functionality, integrating edge computing capabilities to process data locally. This approach ensures the synthetic skin can operate independently, providing valuable sensory feedback for robotic systems. The inclusion of embedded sensors allows for the detection of environmental variables, crucial for robotic navigation and interaction.
Hardware Design & Fabrication
Developed a comprehensive layered architecture for the synthetic skin, utilizing cutting-edge materials like Dragon Skin silicone, DexMat CNT Yarn, and EcoFlex Gel. This design mimics the multi-layered nature of human skin, incorporating advanced materials for their specific properties—elasticity, conductivity, and cushioning. The integration of the Arduino Nano 33 BLE Sense Rev 2 within this architecture allows for sophisticated data processing directly on the hardware, enabling real-time sensory feedback.
Embarked on the meticulous construction of the synthetic skin, embedding a network of sensors within its structure. The fabrication process focused on replicating human skin's functionality, integrating edge computing capabilities to process data locally. This approach ensures the synthetic skin can operate independently, providing valuable sensory feedback for robotic systems. The inclusion of embedded sensors allows for the detection of environmental variables, crucial for robotic navigation and interaction.
Hardware Design & Fabrication
Developed a comprehensive layered architecture for the synthetic skin, utilizing cutting-edge materials like Dragon Skin silicone, DexMat CNT Yarn, and EcoFlex Gel. This design mimics the multi-layered nature of human skin, incorporating advanced materials for their specific properties—elasticity, conductivity, and cushioning. The integration of the Arduino Nano 33 BLE Sense Rev 2 within this architecture allows for sophisticated data processing directly on the hardware, enabling real-time sensory feedback.
Embarked on the meticulous construction of the synthetic skin, embedding a network of sensors within its structure. The fabrication process focused on replicating human skin's functionality, integrating edge computing capabilities to process data locally. This approach ensures the synthetic skin can operate independently, providing valuable sensory feedback for robotic systems. The inclusion of embedded sensors allows for the detection of environmental variables, crucial for robotic navigation and interaction.
Software Engineering (C++)
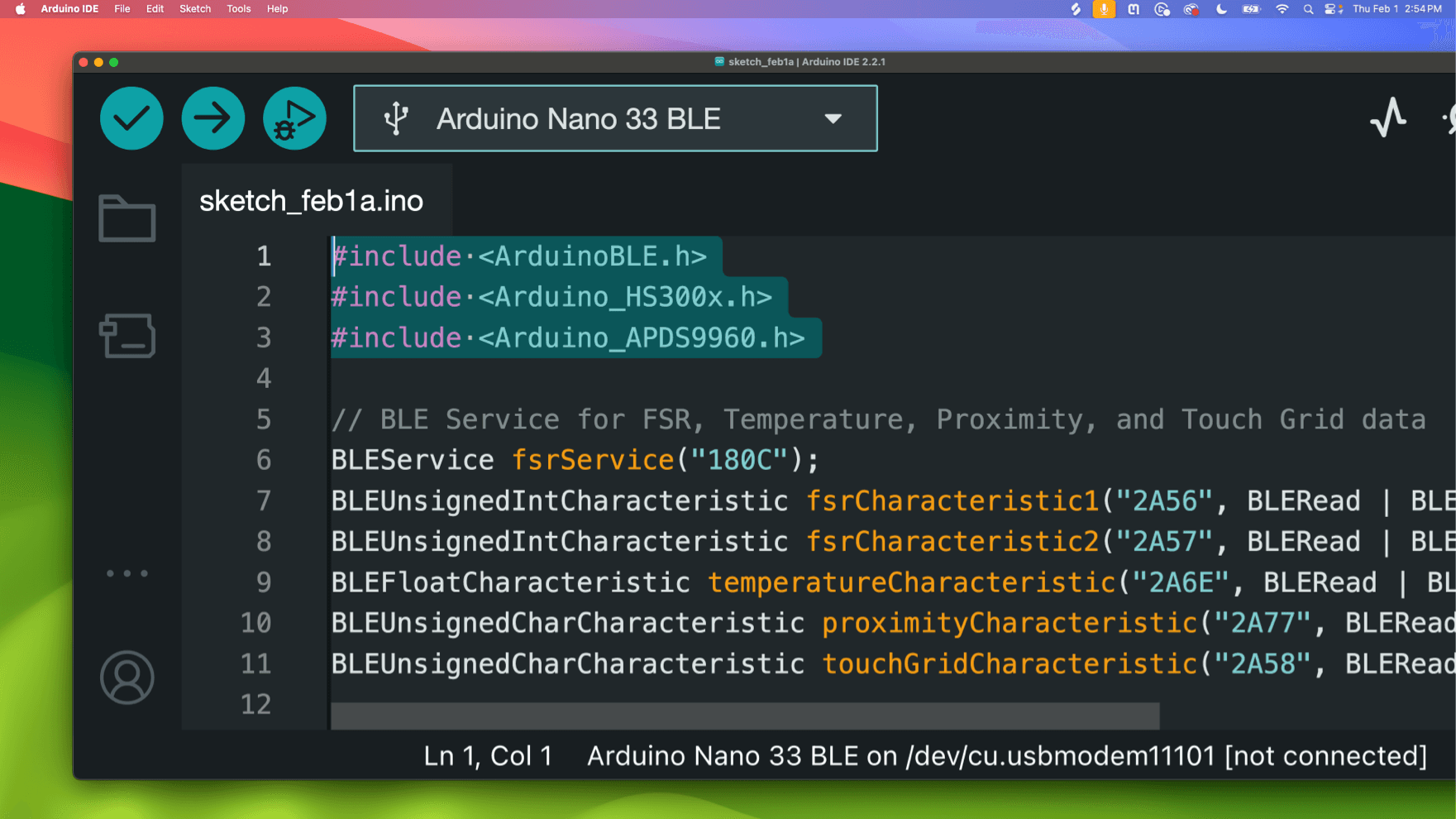
Crafted specialized C++ software to handle sensor data processing and manage real-time operations. This development phase was critical in translating sensor inputs into actionable data, allowing the synthetic skin to interact dynamically with its surroundings. The software architecture was designed to be efficient and responsive, enabling the synthetic skin to process and respond to tactile, temperature, and proximity data seamlessly.
Software Engineering (C++)
Crafted specialized C++ software to handle sensor data processing and manage real-time operations. This development phase was critical in translating sensor inputs into actionable data, allowing the synthetic skin to interact dynamically with its surroundings. The software architecture was designed to be efficient and responsive, enabling the synthetic skin to process and respond to tactile, temperature, and proximity data seamlessly.
Analysis &
Insight Synthethis
Crafted specialized C++ software to handle sensor data processing and manage real-time operations. This development phase was critical in translating sensor inputs into actionable data, allowing the synthetic skin to interact dynamically with its surroundings. The software architecture was designed to be efficient and responsive, enabling the synthetic skin to process and respond to tactile, temperature, and proximity data seamlessly.
Software Engineering (C++)
Crafted specialized C++ software to handle sensor data processing and manage real-time operations. This development phase was critical in translating sensor inputs into actionable data, allowing the synthetic skin to interact dynamically with its surroundings. The software architecture was designed to be efficient and responsive, enabling the synthetic skin to process and respond to tactile, temperature, and proximity data seamlessly.
iOS App Development (Swift)
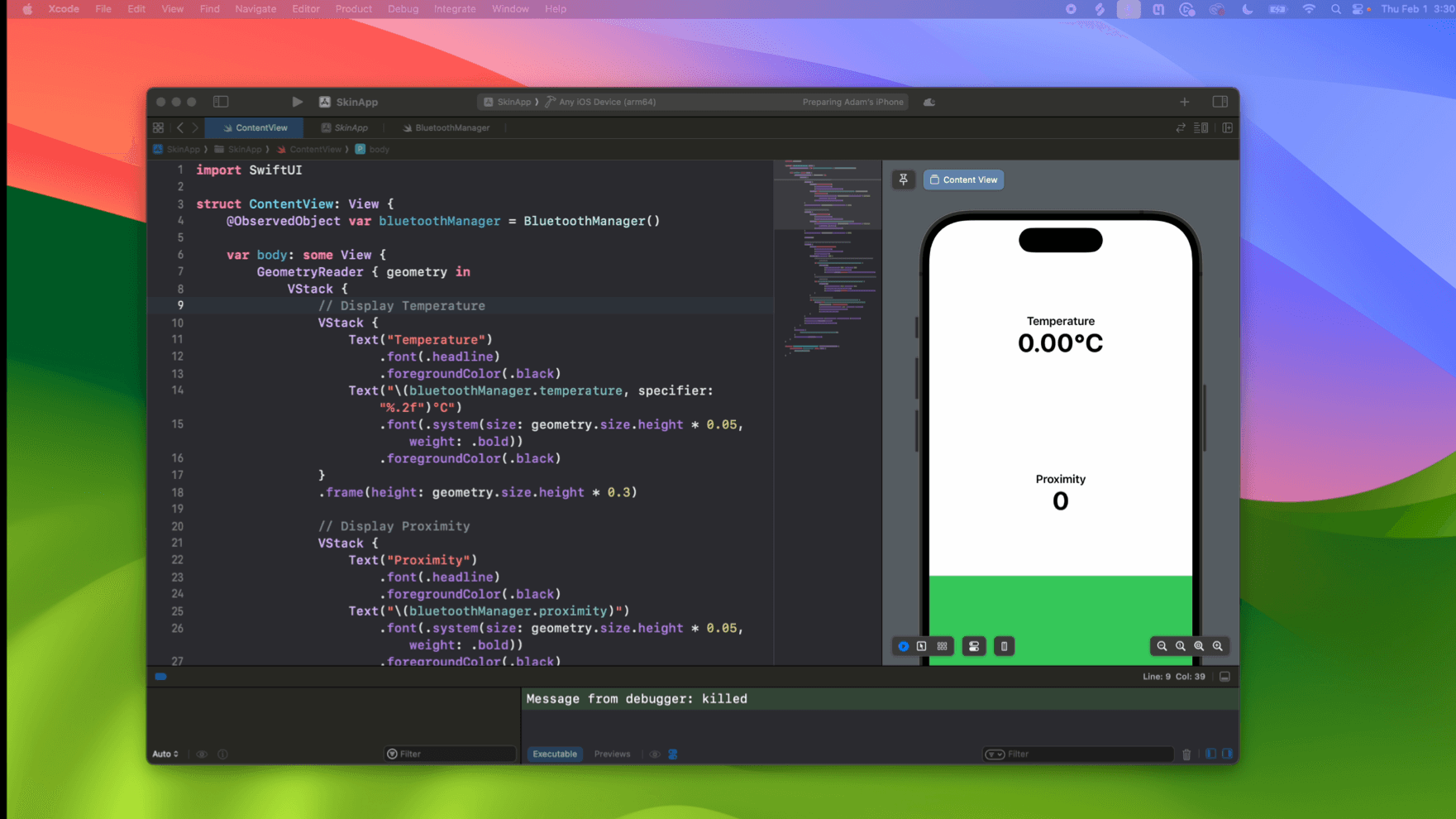
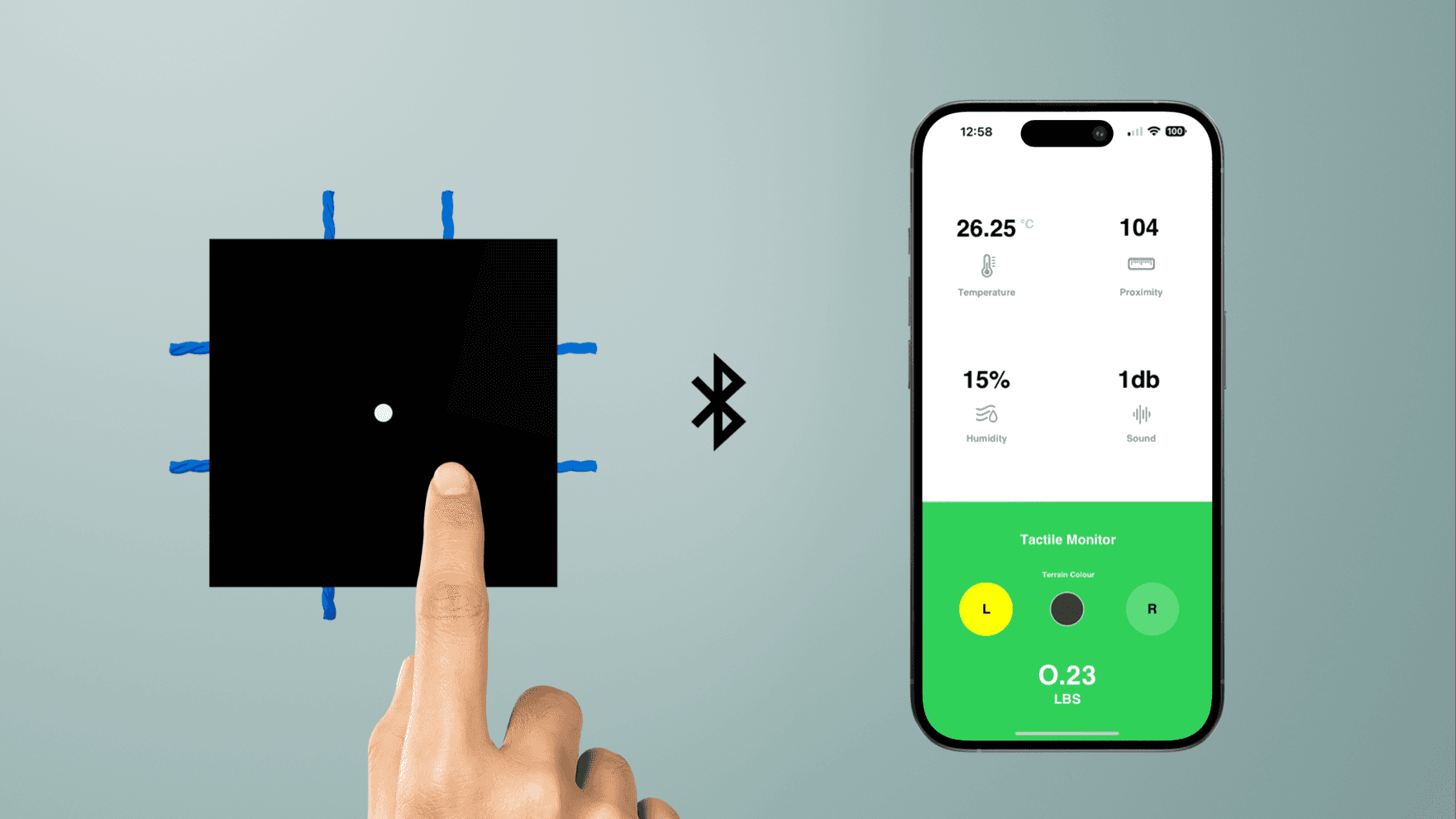
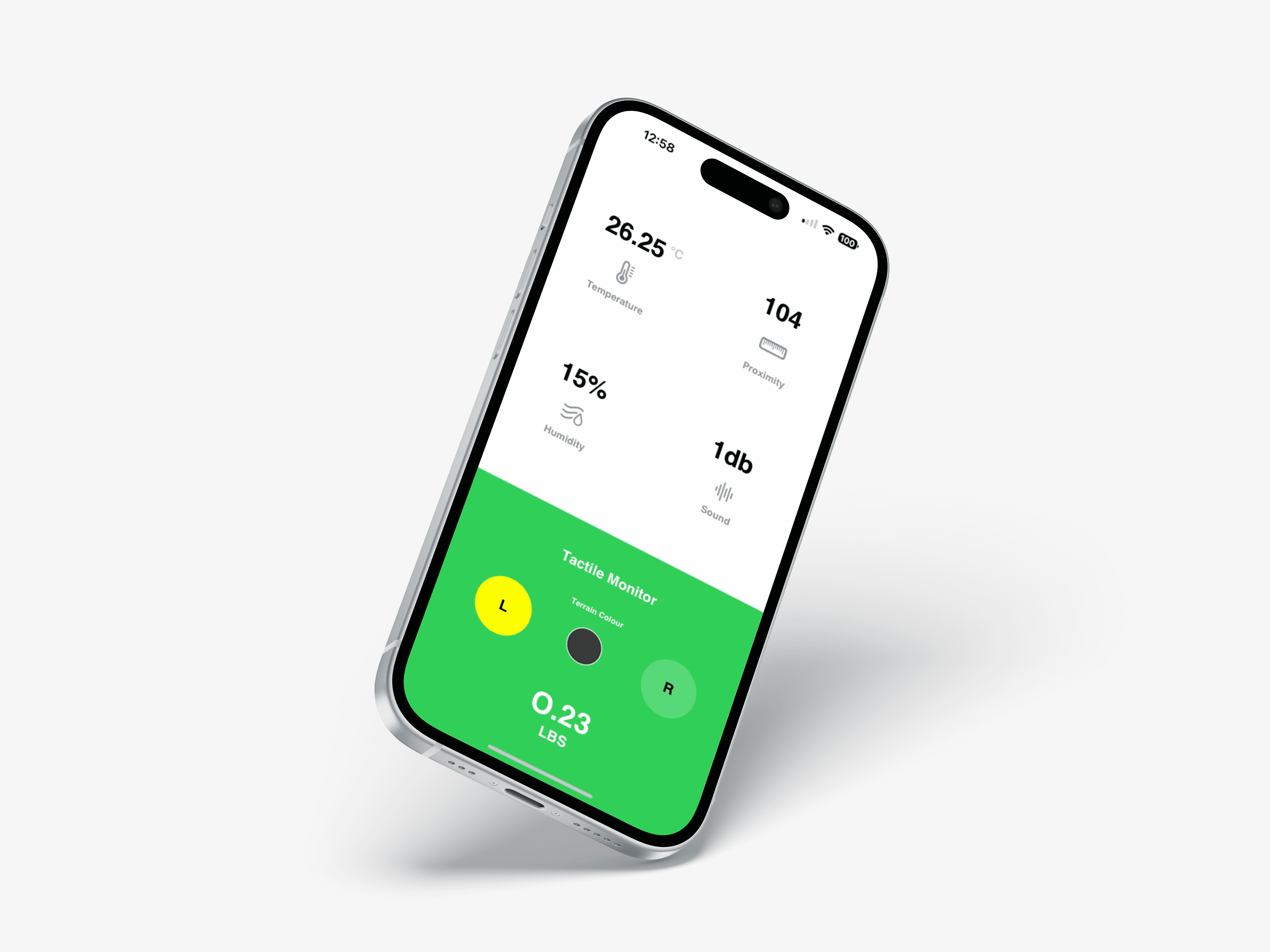
Created an innovative iOS application using Swift, designed to facilitate interaction with and visualization of the data collected by the synthetic skin. This app serves as a bridge between the robotic system and the user, offering a user-friendly platform for monitoring sensor data. The development focused on leveraging Swift's capabilities to provide a responsive and intuitive interface, enhancing the user's ability to interact with and control the synthetic skin system.
iOS App Development (Swift)
Created an innovative iOS application using Swift, designed to facilitate interaction with and visualization of the data collected by the synthetic skin. This app serves as a bridge between the robotic system and the user, offering a user-friendly platform for monitoring sensor data. The development focused on leveraging Swift's capabilities to provide a responsive and intuitive interface, enhancing the user's ability to interact with and control the synthetic skin system.
Analysis &
Insight Synthethis
Created an innovative iOS application using Swift, designed to facilitate interaction with and visualization of the data collected by the synthetic skin. This app serves as a bridge between the robotic system and the user, offering a user-friendly platform for monitoring sensor data. The development focused on leveraging Swift's capabilities to provide a responsive and intuitive interface, enhancing the user's ability to interact with and control the synthetic skin system.
iOS App Development (Swift)
Created an innovative iOS application using Swift, designed to facilitate interaction with and visualization of the data collected by the synthetic skin. This app serves as a bridge between the robotic system and the user, offering a user-friendly platform for monitoring sensor data. The development focused on leveraging Swift's capabilities to provide a responsive and intuitive interface, enhancing the user's ability to interact with and control the synthetic skin system.
HCI and UX Development
Applied principles of Human-Computer Interaction (HCI) and User Experience (UX) design to develop an accessible and efficient Human-Machine Interface (HMI). This process involved creating an interface that simplifies the complexity of the synthetic skin's data, making it easily understandable and actionable for users. The emphasis on HCI and UX principles ensures that the system is not only functional but also user-friendly, fostering a positive interaction between humans and robotic systems.
Synthesized findings to develop actionable strategies for platform improvement. Focused on enhancing content relevance and user interface based on the study, aiming to boost reader engagement and satisfaction.
HCI and UX Development
Applied principles of Human-Computer Interaction (HCI) and User Experience (UX) design to develop an accessible and efficient Human-Machine Interface (HMI). This process involved creating an interface that simplifies the complexity of the synthetic skin's data, making it easily understandable and actionable for users. The emphasis on HCI and UX principles ensures that the system is not only functional but also user-friendly, fostering a positive interaction between humans and robotic systems.
Analysis &
Insight Synthethis
Applied principles of Human-Computer Interaction (HCI) and User Experience (UX) design to develop an accessible and efficient Human-Machine Interface (HMI). This process involved creating an interface that simplifies the complexity of the synthetic skin's data, making it easily understandable and actionable for users. The emphasis on HCI and UX principles ensures that the system is not only functional but also user-friendly, fostering a positive interaction between humans and robotic systems.
Synthesized findings to develop actionable strategies for platform improvement. Focused on enhancing content relevance and user interface based on the study, aiming to boost reader engagement and satisfaction.
HCI and UX Development
Applied principles of Human-Computer Interaction (HCI) and User Experience (UX) design to develop an accessible and efficient Human-Machine Interface (HMI). This process involved creating an interface that simplifies the complexity of the synthetic skin's data, making it easily understandable and actionable for users. The emphasis on HCI and UX principles ensures that the system is not only functional but also user-friendly, fostering a positive interaction between humans and robotic systems.
Synthesized findings to develop actionable strategies for platform improvement. Focused on enhancing content relevance and user interface based on the study, aiming to boost reader engagement and satisfaction.
Result
The project achieved significant milestones, leading to the successful development of a modular synthetic skin system designed to improve robotic traversal capabilities in complex environments. Key accomplishments include:
Modular Synthetic Skin System: The creation of a modular synthetic skin system represents a significant advancement in enhancing robotic interaction with various environments. This system not only enables robots to better navigate and adapt to their surroundings but also opens up new possibilities for robotic applications in challenging settings.
Integration of Advanced Materials and Sensor Technologies: The project successfully integrated state-of-the-art materials and sensor technologies to mimic human skin's tactile sensing capabilities. This integration is crucial for providing robots with enhanced perception abilities, allowing them to detect and respond to their environment more effectively.
Effective Use of Edge Computing: Utilizing the Arduino Nano 33 BLE Sense Rev 2, the project leveraged edge computing to process data in real-time. This approach significantly reduces latency, enabling immediate responses to sensory inputs, which is essential for the dynamic operation of robotic systems in real-world scenarios.
Comprehensive Human-Machine Interface (HMI): A user-friendly HMI was developed for smartphones, facilitating seamless monitoring and interaction with the synthetic skin system. This comprehensive interface enhances user engagement and allows for easy access to real-time data and system controls.
Preliminary Testing and Promising Functionality: Initial tests have demonstrated the synthetic skin's promising functionality and responsiveness. These results lay a solid foundation for further research and development, indicating the system's potential for widespread application in robotics.
New Research Direction for PhD: The outcomes of this project have formulated a pivotal research question for my PhD studies: "Can the combined sensors in the synthetic skin, operating through edge computing, enhance robot traversal in complex environments?" This question signifies a forward-looking approach to exploring the limits of robotic capabilities and opens up a new avenue for groundbreaking research in the field.
Overall, this project not only achieved its objectives but also highlighted the potential for significant advancements in robotic traversal, paving the way for future innovations in the field.
Result
The project achieved significant milestones, leading to the successful development of a modular synthetic skin system designed to improve robotic traversal capabilities in complex environments. Key accomplishments include:
Modular Synthetic Skin System: The creation of a modular synthetic skin system represents a significant advancement in enhancing robotic interaction with various environments. This system not only enables robots to better navigate and adapt to their surroundings but also opens up new possibilities for robotic applications in challenging settings.
Integration of Advanced Materials and Sensor Technologies: The project successfully integrated state-of-the-art materials and sensor technologies to mimic human skin's tactile sensing capabilities. This integration is crucial for providing robots with enhanced perception abilities, allowing them to detect and respond to their environment more effectively.
Effective Use of Edge Computing: Utilizing the Arduino Nano 33 BLE Sense Rev 2, the project leveraged edge computing to process data in real-time. This approach significantly reduces latency, enabling immediate responses to sensory inputs, which is essential for the dynamic operation of robotic systems in real-world scenarios.
Comprehensive Human-Machine Interface (HMI): A user-friendly HMI was developed for smartphones, facilitating seamless monitoring and interaction with the synthetic skin system. This comprehensive interface enhances user engagement and allows for easy access to real-time data and system controls.
Preliminary Testing and Promising Functionality: Initial tests have demonstrated the synthetic skin's promising functionality and responsiveness. These results lay a solid foundation for further research and development, indicating the system's potential for widespread application in robotics.
New Research Direction for PhD: The outcomes of this project have formulated a pivotal research question for my PhD studies: "Can the combined sensors in the synthetic skin, operating through edge computing, enhance robot traversal in complex environments?" This question signifies a forward-looking approach to exploring the limits of robotic capabilities and opens up a new avenue for groundbreaking research in the field.
Overall, this project not only achieved its objectives but also highlighted the potential for significant advancements in robotic traversal, paving the way for future innovations in the field.
Result
The project achieved significant milestones, leading to the successful development of a modular synthetic skin system designed to improve robotic traversal capabilities in complex environments. Key accomplishments include:
Modular Synthetic Skin System: The creation of a modular synthetic skin system represents a significant advancement in enhancing robotic interaction with various environments. This system not only enables robots to better navigate and adapt to their surroundings but also opens up new possibilities for robotic applications in challenging settings.
Integration of Advanced Materials and Sensor Technologies: The project successfully integrated state-of-the-art materials and sensor technologies to mimic human skin's tactile sensing capabilities. This integration is crucial for providing robots with enhanced perception abilities, allowing them to detect and respond to their environment more effectively.
Effective Use of Edge Computing: Utilizing the Arduino Nano 33 BLE Sense Rev 2, the project leveraged edge computing to process data in real-time. This approach significantly reduces latency, enabling immediate responses to sensory inputs, which is essential for the dynamic operation of robotic systems in real-world scenarios.
Comprehensive Human-Machine Interface (HMI): A user-friendly HMI was developed for smartphones, facilitating seamless monitoring and interaction with the synthetic skin system. This comprehensive interface enhances user engagement and allows for easy access to real-time data and system controls.
Preliminary Testing and Promising Functionality: Initial tests have demonstrated the synthetic skin's promising functionality and responsiveness. These results lay a solid foundation for further research and development, indicating the system's potential for widespread application in robotics.
New Research Direction for PhD: The outcomes of this project have formulated a pivotal research question for my PhD studies: "Can the combined sensors in the synthetic skin, operating through edge computing, enhance robot traversal in complex environments?" This question signifies a forward-looking approach to exploring the limits of robotic capabilities and opens up a new avenue for groundbreaking research in the field.
Overall, this project not only achieved its objectives but also highlighted the potential for significant advancements in robotic traversal, paving the way for future innovations in the field.

Situation
In the field of robotics, the capability to navigate and traverse complex environments with minimal human intervention represents a significant challenge that directly impacts autonomy and operational efficiency. Navigation, which encompasses the computational aspect of route planning amidst obstacles, and traversal, the physical embodiment of this plan through movement and interaction within an environment, are critical components of robotic autonomy.
Despite advancements in sensor technologies such as Simultaneous Localization and Mapping (SLAM), RGB-D cameras, and proximity sensors, robots continue to encounter difficulties in autonomous operation, frequently requiring human oversight, encountering obstacles, or even sustaining damage due to inadequate environmental interaction capabilities.
This situation raises a crucial question: How can we substantially improve robots' traversal capabilities in diverse and complex environments? A potential avenue for exploration is the development of a modular, adaptive safety system. Such a system should be universally applicable across various robot designs and sizes, enhancing their ability to navigate and interact with their surroundings safely and efficiently. The goal is to bridge the gap between the theoretical robustness of navigation algorithms and the practical challenges of real-world traversal, thereby increasing the autonomy and utility of robotic systems.
Situation
In the field of robotics, the capability to navigate and traverse complex environments with minimal human intervention represents a significant challenge that directly impacts autonomy and operational efficiency. Navigation, which encompasses the computational aspect of route planning amidst obstacles, and traversal, the physical embodiment of this plan through movement and interaction within an environment, are critical components of robotic autonomy.
Despite advancements in sensor technologies such as Simultaneous Localization and Mapping (SLAM), RGB-D cameras, and proximity sensors, robots continue to encounter difficulties in autonomous operation, frequently requiring human oversight, encountering obstacles, or even sustaining damage due to inadequate environmental interaction capabilities.
This situation raises a crucial question: How can we substantially improve robots' traversal capabilities in diverse and complex environments? A potential avenue for exploration is the development of a modular, adaptive safety system. Such a system should be universally applicable across various robot designs and sizes, enhancing their ability to navigate and interact with their surroundings safely and efficiently. The goal is to bridge the gap between the theoretical robustness of navigation algorithms and the practical challenges of real-world traversal, thereby increasing the autonomy and utility of robotic systems.
Situation
In the field of robotics, the capability to navigate and traverse complex environments with minimal human intervention represents a significant challenge that directly impacts autonomy and operational efficiency. Navigation, which encompasses the computational aspect of route planning amidst obstacles, and traversal, the physical embodiment of this plan through movement and interaction within an environment, are critical components of robotic autonomy.
Despite advancements in sensor technologies such as Simultaneous Localization and Mapping (SLAM), RGB-D cameras, and proximity sensors, robots continue to encounter difficulties in autonomous operation, frequently requiring human oversight, encountering obstacles, or even sustaining damage due to inadequate environmental interaction capabilities.
This situation raises a crucial question: How can we substantially improve robots' traversal capabilities in diverse and complex environments? A potential avenue for exploration is the development of a modular, adaptive safety system. Such a system should be universally applicable across various robot designs and sizes, enhancing their ability to navigate and interact with their surroundings safely and efficiently. The goal is to bridge the gap between the theoretical robustness of navigation algorithms and the practical challenges of real-world traversal, thereby increasing the autonomy and utility of robotic systems.
Situation
In the field of robotics, the capability to navigate and traverse complex environments with minimal human intervention represents a significant challenge that directly impacts autonomy and operational efficiency. Navigation, which encompasses the computational aspect of route planning amidst obstacles, and traversal, the physical embodiment of this plan through movement and interaction within an environment, are critical components of robotic autonomy.
Despite advancements in sensor technologies such as Simultaneous Localization and Mapping (SLAM), RGB-D cameras, and proximity sensors, robots continue to encounter difficulties in autonomous operation, frequently requiring human oversight, encountering obstacles, or even sustaining damage due to inadequate environmental interaction capabilities.
This situation raises a crucial question: How can we substantially improve robots' traversal capabilities in diverse and complex environments? A potential avenue for exploration is the development of a modular, adaptive safety system. Such a system should be universally applicable across various robot designs and sizes, enhancing their ability to navigate and interact with their surroundings safely and efficiently. The goal is to bridge the gap between the theoretical robustness of navigation algorithms and the practical challenges of real-world traversal, thereby increasing the autonomy and utility of robotic systems.
Made by
Good
Humans.
Result
The project achieved significant milestones, leading to the successful development of a modular synthetic skin system designed to improve robotic traversal capabilities in complex environments. Key accomplishments include:
Modular Synthetic Skin System: The creation of a modular synthetic skin system represents a significant advancement in enhancing robotic interaction with various environments. This system not only enables robots to better navigate and adapt to their surroundings but also opens up new possibilities for robotic applications in challenging settings.
Integration of Advanced Materials and Sensor Technologies: The project successfully integrated state-of-the-art materials and sensor technologies to mimic human skin's tactile sensing capabilities. This integration is crucial for providing robots with enhanced perception abilities, allowing them to detect and respond to their environment more effectively.
Effective Use of Edge Computing: Utilizing the Arduino Nano 33 BLE Sense Rev 2, the project leveraged edge computing to process data in real-time. This approach significantly reduces latency, enabling immediate responses to sensory inputs, which is essential for the dynamic operation of robotic systems in real-world scenarios.
Comprehensive Human-Machine Interface (HMI): A user-friendly HMI was developed for smartphones, facilitating seamless monitoring and interaction with the synthetic skin system. This comprehensive interface enhances user engagement and allows for easy access to real-time data and system controls.
Preliminary Testing and Promising Functionality: Initial tests have demonstrated the synthetic skin's promising functionality and responsiveness. These results lay a solid foundation for further research and development, indicating the system's potential for widespread application in robotics.
New Research Direction for PhD: The outcomes of this project have formulated a pivotal research question for my PhD studies: "Can the combined sensors in the synthetic skin, operating through edge computing, enhance robot traversal in complex environments?" This question signifies a forward-looking approach to exploring the limits of robotic capabilities and opens up a new avenue for groundbreaking research in the field.
Overall, this project not only achieved its objectives but also highlighted the potential for significant advancements in robotic traversal, paving the way for future innovations in the field.
Result
The project achieved significant milestones, leading to the successful development of a modular synthetic skin system designed to improve robotic traversal capabilities in complex environments. Key accomplishments include:
Modular Synthetic Skin System: The creation of a modular synthetic skin system represents a significant advancement in enhancing robotic interaction with various environments. This system not only enables robots to better navigate and adapt to their surroundings but also opens up new possibilities for robotic applications in challenging settings.
Integration of Advanced Materials and Sensor Technologies: The project successfully integrated state-of-the-art materials and sensor technologies to mimic human skin's tactile sensing capabilities. This integration is crucial for providing robots with enhanced perception abilities, allowing them to detect and respond to their environment more effectively.
Effective Use of Edge Computing: Utilizing the Arduino Nano 33 BLE Sense Rev 2, the project leveraged edge computing to process data in real-time. This approach significantly reduces latency, enabling immediate responses to sensory inputs, which is essential for the dynamic operation of robotic systems in real-world scenarios.
Comprehensive Human-Machine Interface (HMI): A user-friendly HMI was developed for smartphones, facilitating seamless monitoring and interaction with the synthetic skin system. This comprehensive interface enhances user engagement and allows for easy access to real-time data and system controls.
Preliminary Testing and Promising Functionality: Initial tests have demonstrated the synthetic skin's promising functionality and responsiveness. These results lay a solid foundation for further research and development, indicating the system's potential for widespread application in robotics.
New Research Direction for PhD: The outcomes of this project have formulated a pivotal research question for my PhD studies: "Can the combined sensors in the synthetic skin, operating through edge computing, enhance robot traversal in complex environments?" This question signifies a forward-looking approach to exploring the limits of robotic capabilities and opens up a new avenue for groundbreaking research in the field.
Overall, this project not only achieved its objectives but also highlighted the potential for significant advancements in robotic traversal, paving the way for future innovations in the field.