Computational Public Safety
Public safety robotics requires systems that function reliably in constrained, hazardous, and human-critical environments. These conditions demand applied solutions rather than idealized laboratory results.
Public safety robotics requires systems that function reliably in constrained, hazardous, and human-critical environments. These conditions demand applied solutions rather than idealized laboratory results.

As a member of Toronto Metropolitan University’s Computational Public Safety Lab, my role was to contribute to robotics projects under Alex Ferworn aligned with real public safety needs. The focus was on assistive and safety-driven applications.
As a member of Toronto Metropolitan University’s Computational Public Safety Lab, my role was to contribute to robotics projects under Alex Ferworn aligned with real public safety needs. The focus was on assistive and safety-driven applications.
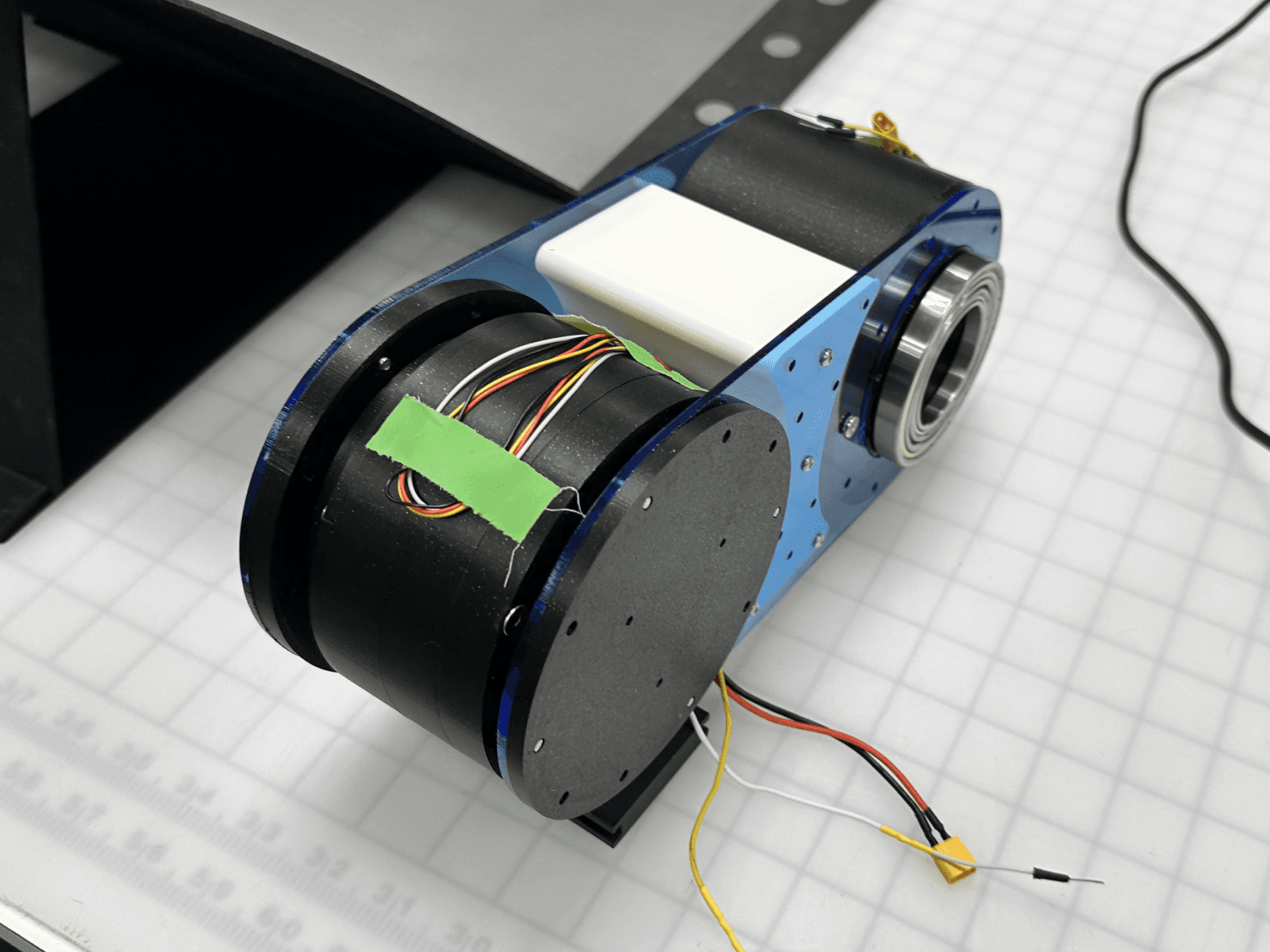
I worked on mobile robots and robotic arms, developing control strategies and algorithms to support users with diminished mobility or physical confinement. The work emphasized robustness, safety, and deployability in real operational contexts.
I worked on mobile robots and robotic arms, developing control strategies and algorithms to support users with diminished mobility or physical confinement. The work emphasized robustness, safety, and deployability in real operational contexts.
This experience strengthened my ability to translate robotics research into practical systems. It also reinforced a public-safety-first engineering mindset grounded in real-world constraints.
This experience strengthened my ability to translate robotics research into practical systems. It also reinforced a public-safety-first engineering mindset grounded in real-world constraints.